 Fraunhofer-Institut für Großstrukturen in der Produktionstechnik IGP
Fraunhofer-Institut für Großstrukturen in der Produktionstechnik IGPVorführung des Roboters
Grüner Strom aus Windkraftanlagen leistet bereits jetzt einen wichtigen Beitrag zum Klimaschutz. Um die Windkraftanlagen auch in windarmen Regionen nutzen zu können, müssen Windräder mit immer größeren Nabenhöhen gebaut werden. Die wachsenden Höhen der Windtürme stellen auch die Turmbauer*innen vor neue Herausforderungen. Beim alternativen Bau von Windkraftanalagen in Paneelbauweise, sinkt zum Vergleich zur herkömmlichen Bauweise und weiter steigender Turmhöhe die Wirtschaftlichkeit und der Bau der Türme wird immer teurer. Das Fraunhofer IGP hat deshalb gemeinsam mit einem Industriepartner eine Automatisierungslösung zum mechanischen Fügen der Paneele entwickelt. Ein Bolzensteckroboter unterstützt die Turmbauer:innen bei der Montage der Elemente. Die Monteur:innen schrauben lediglich den Fügepart des Verbindungssystems von der Innenseite des Turmes auf und führt die Teile dann zusammen.

Ingenieur Sascha Lauer erläutert das Projekt.
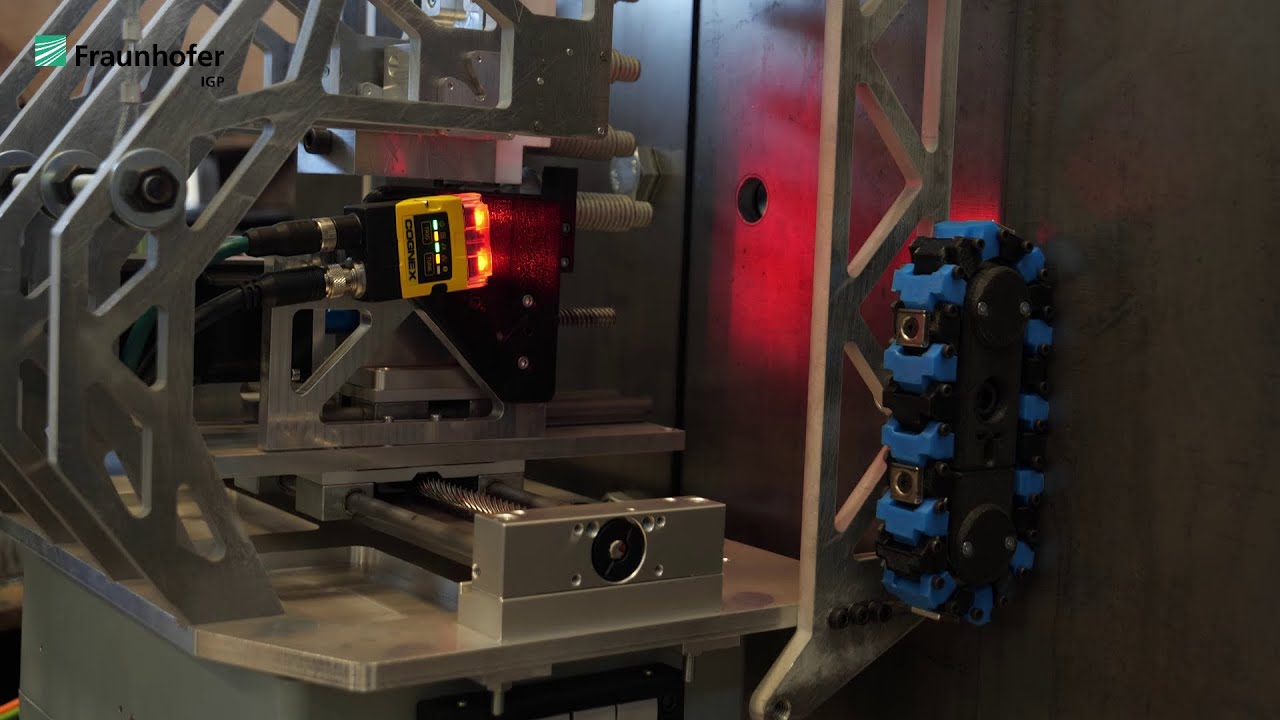
Die Verbindungssysteme werden von der Außenseite des Turms automatisiert zugeführt. Der Bolzensteckroboter fährt die Verbindungsstellen autonom ab. Für die Durchführung des Steckvorgangs wird der entwickelte Bolzensteckroboter mittels einer am Paneel montierten Seilwinde mit einer vordefinierten Geschwindigkeit nach oben gezogen. Während dieser Bewegung wird der Fügebereich am Paneel kontinuierlich mit einem Bildverarbeitungssensor, der an der Auswahlachse montiert ist, überwacht und ausgewertet. Sofern eine Verbindungsstelle in den Auswertebereich des Sensors detektiert wird, werden die vom Sensor ermittelten Koordinaten der Verbindungsstelle an eine übergeordnete Steuerung übergeben. Mit Hilfe dieser Koordinaten berechnet die Steuerung die erforderlichen Positionen der Achsen des Stecksystems und nimmt den Bolzensteckvorgang vollautomatisch vor.